“十六条腿走路的乐高很难找?”
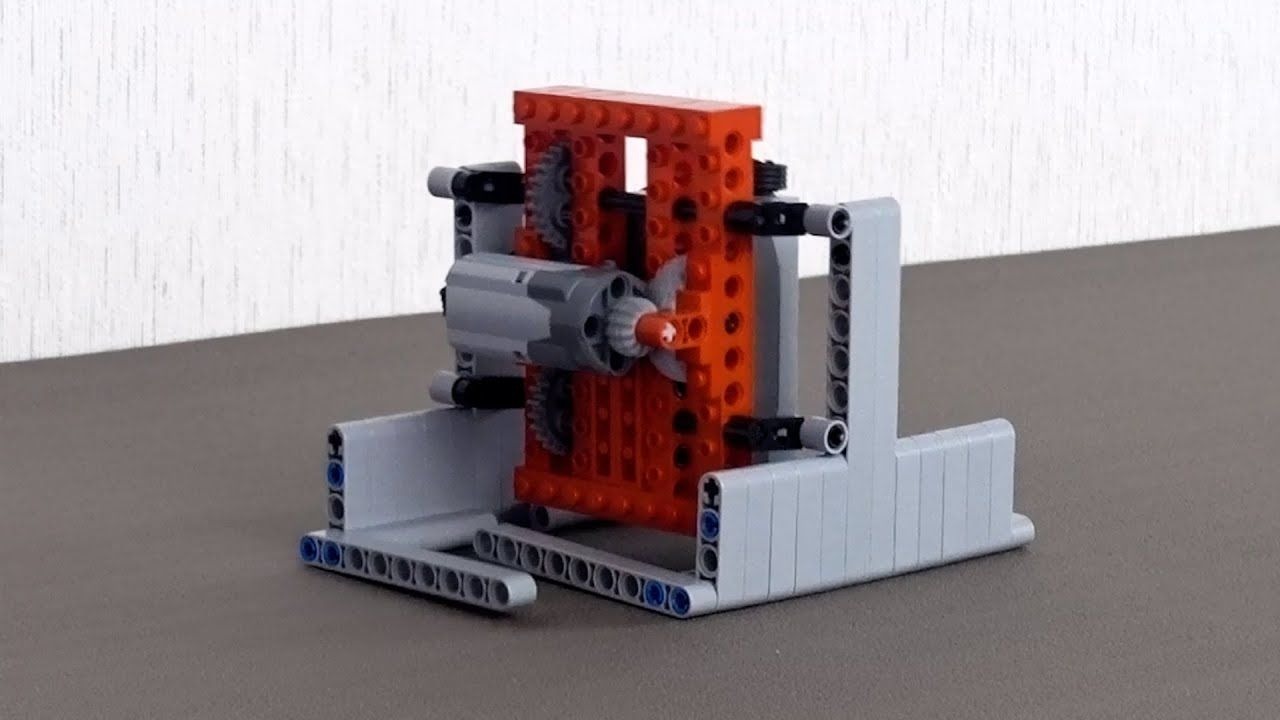
00:00 简单的双腿行走机器人(无转向功能)
01:18 双腿行走机器人(双腿+行走底座,尾部腿用于转向)
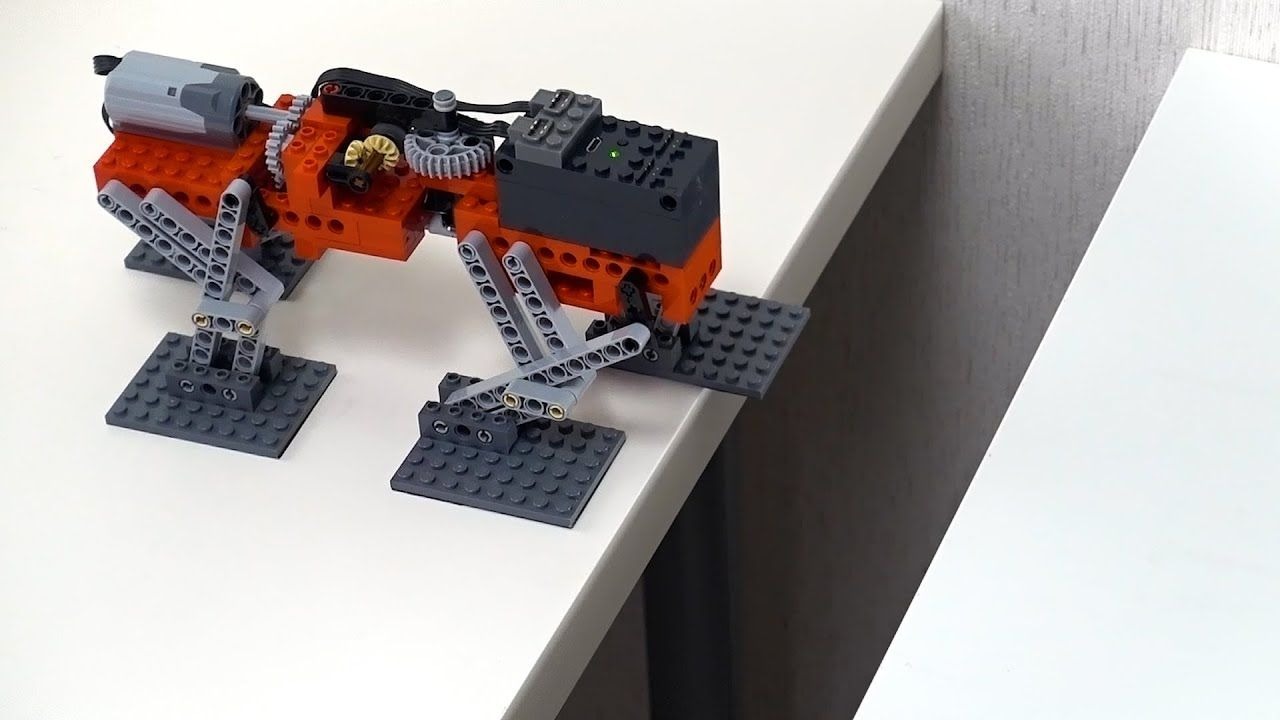
02:41 四腿行走机器人
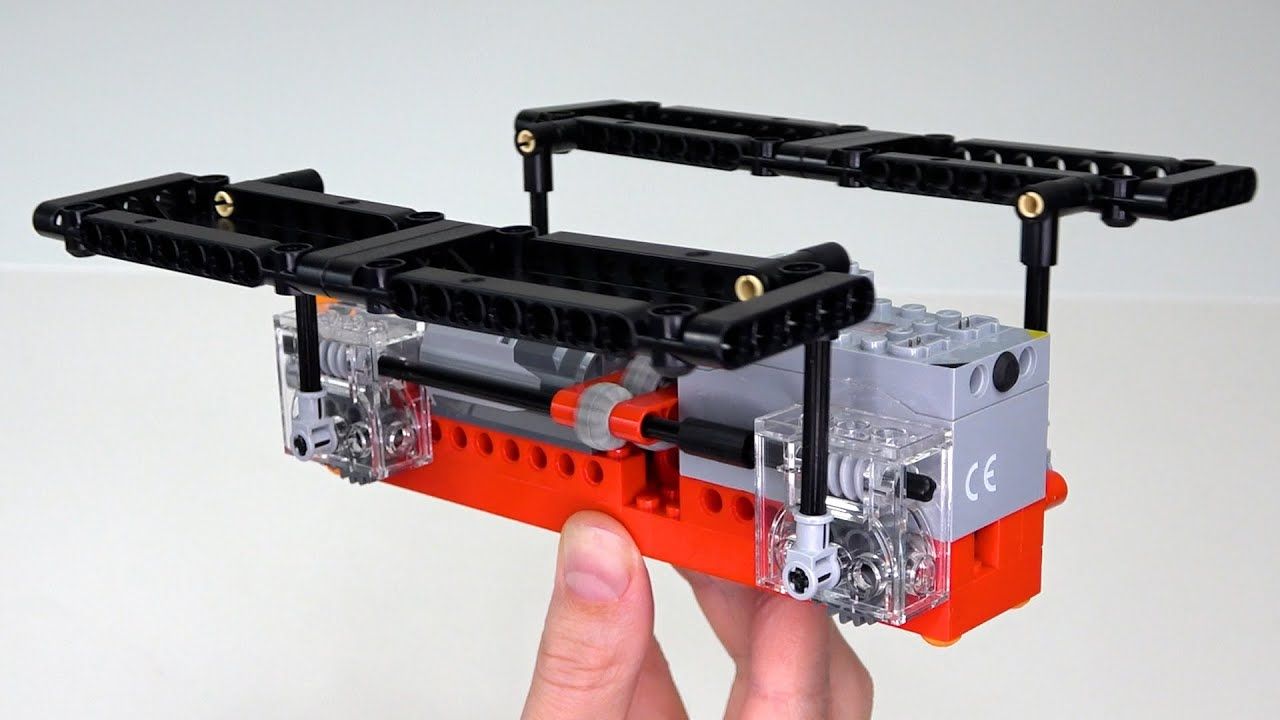
04:42 八腿行走机器人(Klann连杆机构)
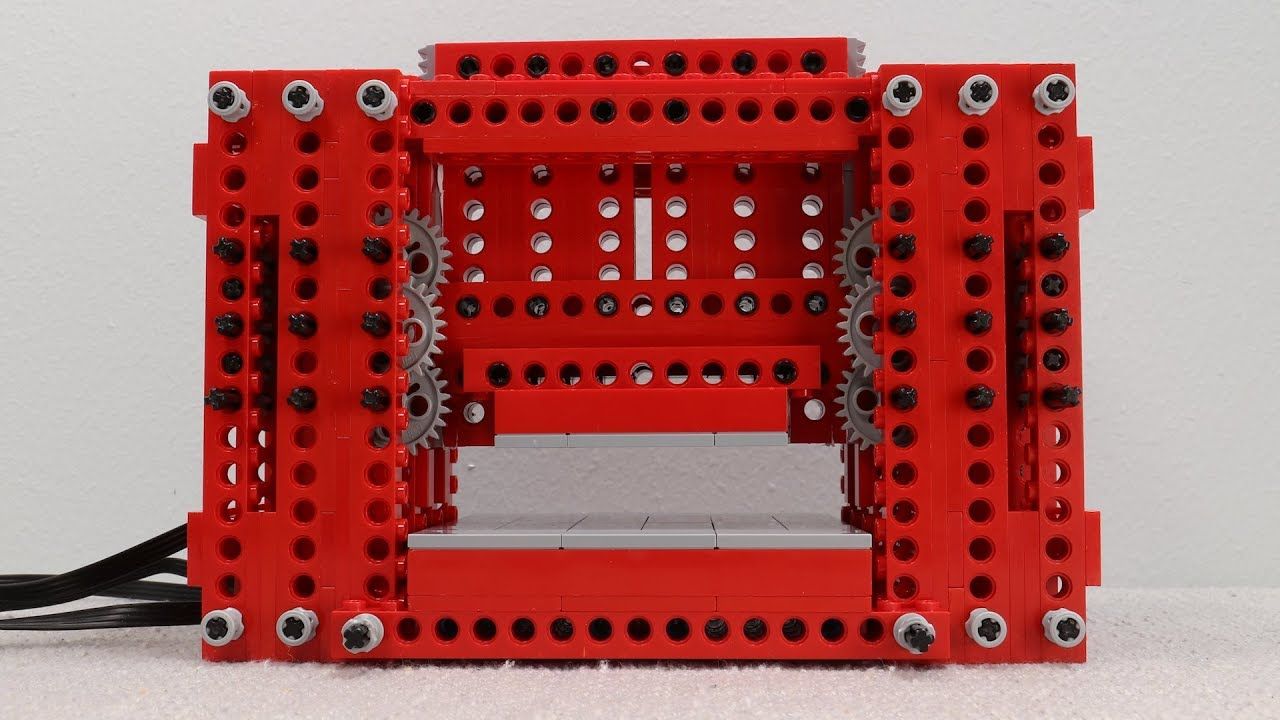
06:44 十六腿行走机器人
08:32 乐高游行
-------------
什么是Klann连杆机构?
Klann连杆机构是一种机械装置,用来让机器人像动物一样走路。它是美国人Joe Klann在1994年发明的,常用在机器人或乐高模型上。
它怎么工作?
结构:它由几根连杆(像小棒)和铰链(可以转动的连接点)组成。
运动:一根连杆转动时,带动其他连杆,让“腿”像走路一样动起来:先抬腿、向前迈、再放下。
效果:看起来像蜘蛛或昆虫走路,腿的动作很平稳。
有什么用?
机器人:让机器人能在不平的地上走,比如沙地或石头地。
教育:用在乐高或课堂上,教大家机械怎么动。
研究:模仿动物的走路方式,设计更像生物的机器人。
视频中的例子
视频里“04:42 八腿行走机器人(Klann连杆机构)”就是用这个机构做的。八条腿一起动,像蜘蛛一样走路,很稳定。
优点和缺点
优点:能在不平地上走,动作像真动物。
缺点:走得慢,零件多,做起来有点复杂。
总结
Klann连杆机构就是用连杆让机器人像动物一样走路的装置,适合在不平地上用,常出现在机器人或乐高模型里。
01:18 双腿行走机器人(双腿+行走底座,尾部腿用于转向)
02:41 四腿行走机器人
04:42 八腿行走机器人(Klann连杆机构)
06:44 十六腿行走机器人
08:32 乐高游行
-------------
什么是Klann连杆机构?
Klann连杆机构是一种机械装置,用来让机器人像动物一样走路。它是美国人Joe Klann在1994年发明的,常用在机器人或乐高模型上。
它怎么工作?
结构:它由几根连杆(像小棒)和铰链(可以转动的连接点)组成。
运动:一根连杆转动时,带动其他连杆,让“腿”像走路一样动起来:先抬腿、向前迈、再放下。
效果:看起来像蜘蛛或昆虫走路,腿的动作很平稳。
有什么用?
机器人:让机器人能在不平的地上走,比如沙地或石头地。
教育:用在乐高或课堂上,教大家机械怎么动。
研究:模仿动物的走路方式,设计更像生物的机器人。
视频中的例子
视频里“04:42 八腿行走机器人(Klann连杆机构)”就是用这个机构做的。八条腿一起动,像蜘蛛一样走路,很稳定。
优点和缺点
优点:能在不平地上走,动作像真动物。
缺点:走得慢,零件多,做起来有点复杂。
总结
Klann连杆机构就是用连杆让机器人像动物一样走路的装置,适合在不平地上用,常出现在机器人或乐高模型里。
AV号
BV号
UP主
标签
做一种很新的手工玩具DIY生活记录手工高能乐高创意模型记录寻找100位非遗手艺人 3.0
参数信息
投稿时间2025-04-01 09:33:26
发布时间2025-04-01 09:33:25
分辨率1920x1080
总时长9分17秒
视频信息
投币455
弹幕557
收藏2062
点赞9226
评论185
转发281
播放218763
分Part信息
#1 - “十六条腿走路的乐高很难找?”
CID号
时长9分17秒
分辨率1920x1080
分季信息
BEC乐高实验 -
剧集信息
正片
#1 - 人类对于乐高的开发,还不足百分之一
投稿时间2024-05-20 10:52:18
发布时间2024-05-20 10:52:18
#2 - 乐高车车过路,但是本地人扎堆版
投稿时间2024-05-21 10:50:00
发布时间2024-05-21 10:50:00

#3 - :不是,你就不能去研究点别的?
投稿时间2024-06-17 09:57:30
发布时间2024-06-17 09:57:30

#4 - :呵,塔吊也就图一乐,真起重还得看乐高
投稿时间2024-06-21 10:30:00
发布时间2024-06-21 10:30:00
#5 - 冲床?!这么冷门的赛道都给乐高闯进去了
投稿时间2024-06-27 10:55:00
发布时间2024-06-27 10:55:00


#9 - "噗啊!今天高低要试试这水的高低"
投稿时间2024-08-16 11:15:30
发布时间2024-08-16 11:15:30
#10 - “控制变量法让你玩明白了”
投稿时间2024-08-23 10:30:00
发布时间2024-08-23 10:30:00
#11 - 谁曾想,乐高+磁铁竟能掀起如此风波
投稿时间2024-09-30 11:00:00
发布时间2024-09-30 11:00:00
#12 - “人怎么能激进成这样”
投稿时间2024-10-12 10:30:34
发布时间2024-10-12 10:30:34
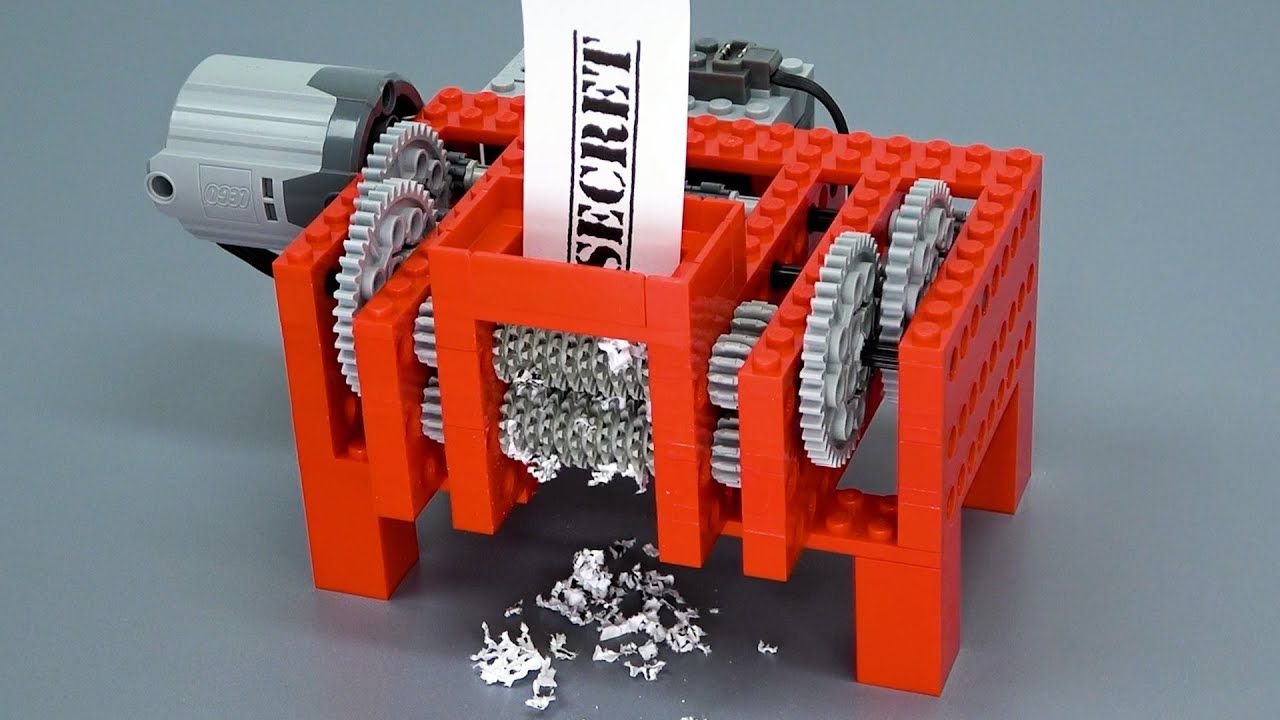
#13 - 乐高碎纸机,启动!
投稿时间2024-10-14 10:07:14
发布时间2024-10-14 10:07:14

#14 - :为乐高马达提供30伏电压
投稿时间2024-11-15 10:05:48
发布时间2024-11-15 10:05:48


#16 - 大全集长达四小时!乐高实验马拉松~
投稿时间2025-02-07 10:23:42
发布时间2025-02-07 10:23:42
#17 - “十六条腿的乐高很难找?”
投稿时间2025-04-01 09:33:25
发布时间2025-04-01 09:33:25
#18 - :任何路况都如履平地啊
投稿时间2025-04-14 10:12:15
发布时间2025-04-14 10:12:15